| john@email.johncon.com |
| http://www.johncon.com/john/ |
|
|
|
||
Control Program for the X10 CM17A and MR26A |
|||
Home | John | Connie | Publications | Software | Correspondence | NtropiX | NdustriX | NformatiX | NdeX | Thanks
|
Spx10 is for asynchronous raw serial port communication with the X10 CM17A Computer Interface and MR26A RF Receiver used in many home automation systems. The program is intended to provide simple and reliable serial port communication between a computer running Linux and the X10 CM17A, (e.g., "Firecracker,") Computer Interface and MR26A RF Receiver, (both on the same port,) and allows X10 devices to be controlled, and monitored, via RF transmission by the computer, (the X10 UR81A Universal Remote, often distributed with the MR26A is supported, also.) The default port is /dev/ttyS0 at 9600 baud. The default semaphore lock file is /var/lock/LCK..ttyS0, which has an fcntl(2) advisory lock applied. The serial port is controlled through termios(3), and is restored to original values on exit. The serial port child read process is created by fork(2) from the parent write process, and both processes respond to SIGINT = ^C and SIGTERM signals. Asynchronous serial port control is implemented with select(2). The input file, (usually stdin for commands,) uses canonical input for flow control. The X10 device and transmission codes are cross indexed in a binary search database using mmap(2), which also contains a command sequence field, (including shell calls,) that are executed in response to a specific transmission code. Variable names and states are supported via a hash lookup table. The database file is a Unix tab delimited field file, in lexical order, (i.e., constructed with sort(1),) consisting of four fields:
For example: would turn on device A11, and then, send a message to my cell phone if motion was detected on my front porch, but only if the variable "ix" was set, (e.g., the variable "ix" enables transmission to my cell phone.) The motion detector is on house code A, device code 9, which has the transmission sequence, "d5 aa 64 00 ad." (The reason for including the transmission sequence in the database was for extensibility with other devices and products-the program will print unknown transmission sequences received for future inclusion in the database-or take evasive action in jamming or collision situations, etc.) The language in field 4:
Note that the isset and isnotset commands allow simple constructs-the main function is to inhibit spawning a shell for every instance of a state change, (like a motion detector in a room,) for example: would invoke a shell process only if x123, (or abc,) is set; any more complicated constructs should be handled by the shell interpreter in a batch file. The isset and isnotset commands can be chained to provide "and" boolean functionality, for example: would invoke a shell process only if x123 is set, and y456 is not set. The program is not intended to be interactive, (although it does accept commands from stdin,) and is a network centric automaton, (daemon, 'bot., etc.,) launched in the computer's init scripts. An example invocation is: Commands, to be sent to X10 devices are written to the named pipe, myfile, (the named pipe is also used by the program to send commands in response to transmission sequences-fcntl(2) advisory locking is provided for concurrency control,) and received transmissions, and database lookups, are printed to stdout for logging considerations. The program is intended for inclusion in a network centric embedded home automation system, (based on a "live CD" version of Knoppix, with no hard disk for security considerations.) The Knoppix system is installed on a depreciated laptop, and since no display-or hard disk-is required, will run many hours without electricity. The laptop communicates sensor data, (internal motion, etc.,) via an attached, (RS232 serial port charging cable,) cell phone, through SMS text messaging. The communication is bidirectional for ancillary device control. The CM17A section of the code is based on code from the BottleRocket program, by Tymm Twillman, Ashley Clark, David Anderson, Warner Losh, and, Christian Gafton. © 1999 Ashley Clark (aclark@ghoti.org) and Tymm Twillman (tymm@acm.org) Free Software. LGPL applies. No warranties expressed or implied. The serial port code is based on the spcid program, the database code is based on the (NdeX program, and the hash table code on hash.shar.gz, available on http://www.johncon.com/. Notes to system integrators
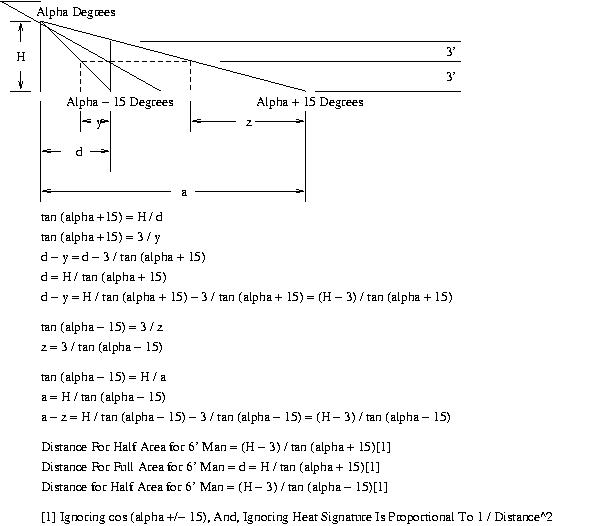
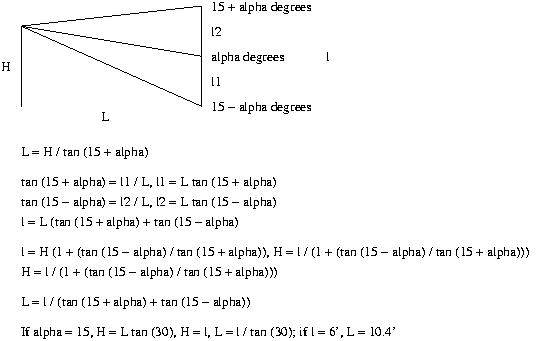
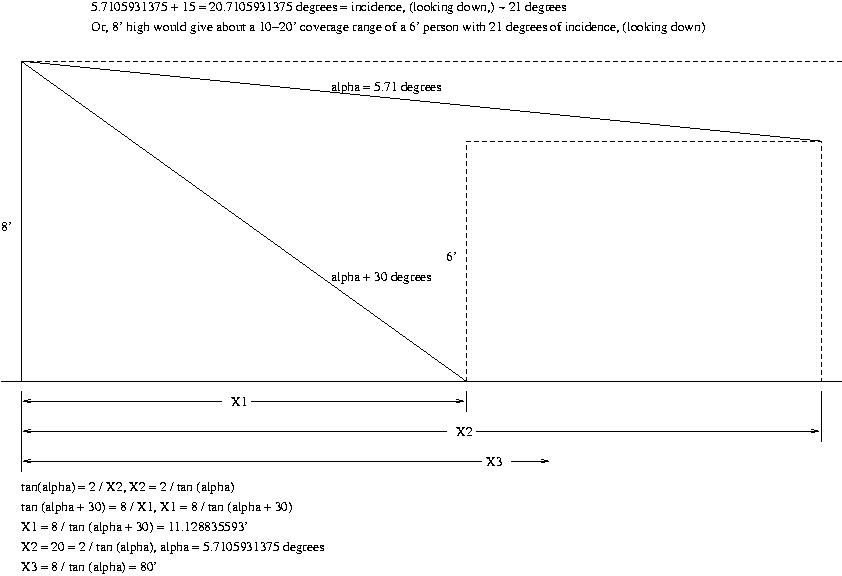
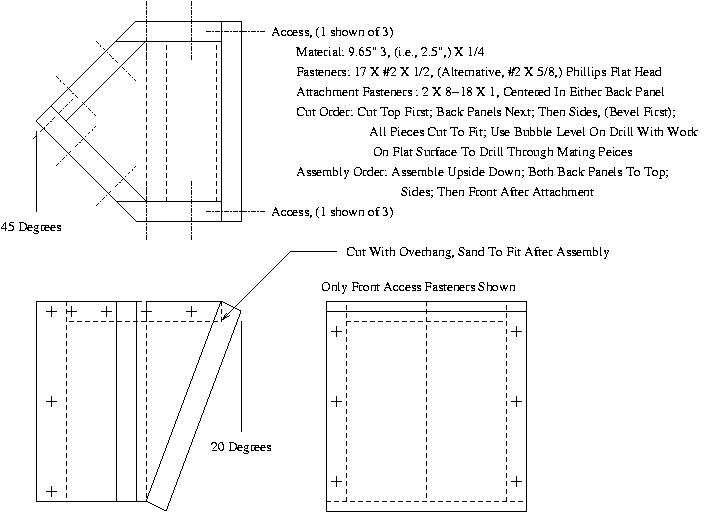
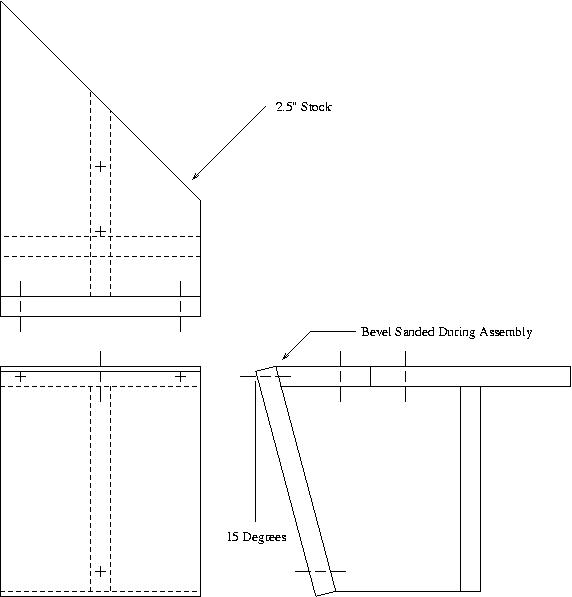
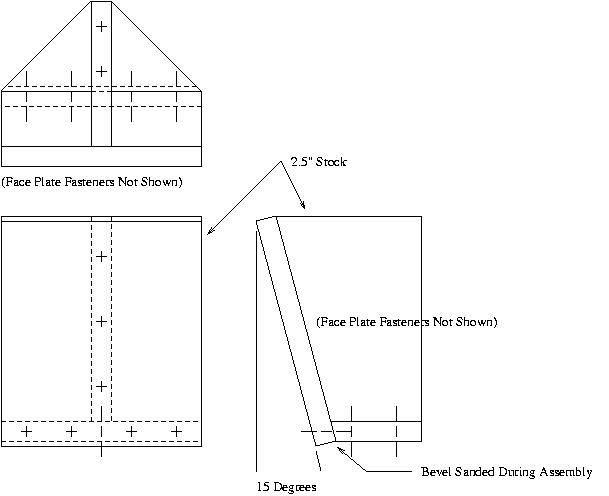
Some thoughts on using the X10 MS14A EagleEye Motion SensorThe sensor should be mounted where traffic walks across the field of the sensor, as opposed to walking at the sensor. For internal use, this means mounting the sensor at a 45 degree angle to both walls in the corner of a room. For external use, this means the sensor should be mounted 45 degrees from perpendicular to the wall. Additionally, the sensors should have a negative incidence, (i.e., looking down,) of about 21 degrees. Failure to do this will result in false alarms since sensor has considerable range under ideal conditions, (i.e., cold, clear nights.) Formulas for calculating the optimal incidence are available from my notes as jpeg images, surveillance-incidence.jpg, surveillance-incidence-1.jpg, surveillance-incidence-2.jpg, (which is probably the most useful,) and their xfig sources, surveillance-incidence.fig, surveillance-incidence-1.fig, surveillance-incidence-2.fig, (which is probably the most useful.) I housed the external sensors in handmade brackets, (the only tools used were a 1/4" drill, and an inexpensive plastic miter box.) The material used was 1/4" x 3" x 2', (which measured 2.75",) popular and number 2 flat head screws for fasteners-all available at local hardware stores. Each bracket takes about 15 minutes to make, plus sanding and painting. The diagrams are available from my notes as jpeg images, surveillance.bracket.jpg, surveillance.bracket.exterior.jpg and their xfig sources, surveillance.bracket.fig, surveillance.bracket.exterior.fig. The latter is much easier to make, and was used where they were not visible. These look like bracket.jpg, and, outside.jpg. The internal sensor bracket diagram is available from my notes as a jpeg image, surveillance.bracket.interior.jpg and its xfig source surveillance.bracket.interior.fig. The 45 degree mounting angle is clearly visible. This looks like inside.jpg Other alternatives are brackets made from PVC pipe, with two elbows, (one adjusts sensor field of view up/down, the other left/right.) However, mounting the bracket and sensor is problematical. Flying model airplane control surface hinges, available at hobby shops, could be used with a little ingenuity, too. The xfig source for plan field of view "paper dolls" for the X10 MS14A EagleEye Motion Sensor is available, surveillance-symbols.fig, to facilitate coverage planning-a 21 degree negative incidence is assumed on the sensor. The X10 MS14A EagleEye motion sensor is not recommended for use as an intrusion detection device. However, their low cost, (particularly on Ebay,) permits the entire perimeter of a domicile to be surveilled to a distance of about twenty feet-usually using only two per outside wall. More sophisticated implementations would allow multiple devices to surveil a perimeter area in overlapping cross fields for false positive reduction. Since the sensors communicate via RF, it is wise to leave several blank house/unit addresses unused but monitored for scan/jamming detection-which is also relayed via cell phone. (The spx10 program can detect random transmissions-that's what the database file of valid unit addresses is for-as a simple countermeasure technique.) AvailabilityThe sources to program is available in the archive, http://www.johncon.com/john/archive/spx10.tar.gz. LicenseA license is hereby granted to reproduce this software source code and to create executable versions from this source code. The copyright notice included with the software must be maintained in all copies produced. THIS PROGRAM IS PROVIDED "AS IS". THE AUTHOR PROVIDES NO WARRANTIES WHATSOEVER, EXPRESSED OR IMPLIED, INCLUDING WARRANTIES OF MERCHANTABILITY, TITLE, OR FITNESS FOR ANY PARTICULAR PURPOSE. THE AUTHOR DOES NOT WARRANT THAT USE OF THIS PROGRAM DOES NOT INFRINGE THE INTELLECTUAL PROPERTY RIGHTS OF ANY THIRD PARTY IN ANY COUNTRY. So there. Copyright © 1992-2008, John Conover, All Rights Reserved. The CM17A section of the code is based on code from the BottleRocket program by Tymm Twillman, Ashley Clark, David Anderson, Warner Losh, and, Christian Gafton. (c) 1999 Ashley Clark and Tymm Twillman Free Software. LGPL applies. No warranties expressed or implied. Comments and/or problem reports should be addressed to:
|
Home | John | Connie | Publications | Software | Correspondence | NtropiX | NdustriX | NformatiX | NdeX | Thanks
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}